
A multimodal marine robot that can swim, crawl and glide in deep ocean zones was built.
Source: TechXplore
A team of mechanical engineers at Beihang University, working with a deep-sea diving specialist from the Chinese Academy of Sciences and a mechanic from Zhejiang University, all in China, have designed, built, and tested a marine robot that can swim, crawl, and glide untethered in the deepest parts of the ocean.
In their paper published in the journal Science Robotics, the group describes the factors that went into their design and how well their robot performed when tested.
Over the past several decades, underwater robots have become very important tools for studying the various parts of the world’s oceans and the creatures that live in them. More recently, it has been noted that most such craft, especially those that are sent to very deep parts of the sea, are cumbersome and not very agile.

Robots also tend to stir up sand to the extent that discerning what a section of seabed looked like before the arrival of the robot becomes difficult. For this new study, the researchers developed a new kind of deep-sea underwater robot that could overcome such problems.
Their robot is much smaller than others that have been sent into very deep water—they describe it as centimeter-scale, with a soft actuator that weighs just 16 grams. It was designed with a snap-through action to allow the robot to shift between two stable states while underwater.
The first state is with legs retracted and tail and fins deployed. The second state is with legs activated and the fins folded out of the way. The changeover is done using shape-memory springs. The robot was also fitted with a microcontroller and battery—it moves by swimming or gliding using soft gentle flapping wings and tail movement, or by walking along the sea floor.
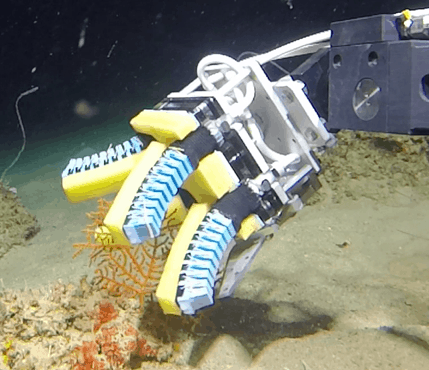
The researchers note that the robot has been successfully tested at great depths—at 1,384 meters when sent to the bottom of the Haima Cold Seep and at 10,666 meters when sent into the Marianna Trench. They used the same type of actuator attached to a rigid arm to build a soft-type gripper for use in retrieving live creatures from the deep ocean.
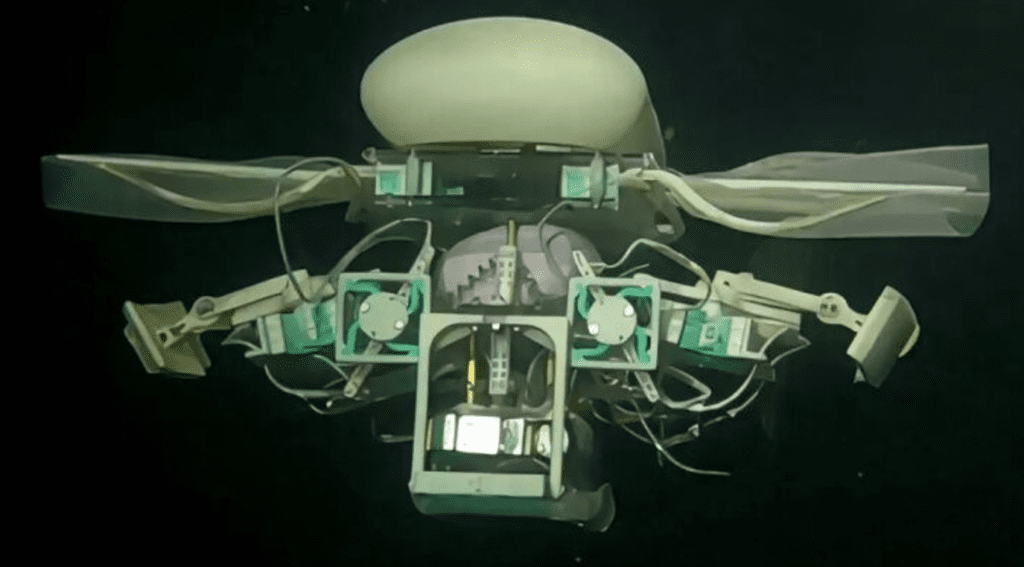
The video below shows the robot being tested on Marianna Trench.

{kind=link}