
O granulobot é uma plataforma robótica, com várias unidades, que juntas agem como um robô que muda de forma para realizar tarefas.
Como funciona o granulobot?
Construído pela Universidade de Chicago, em 2023, e inspirado nas propriedades dos materiais granulares, que deu a origem ao nome. Este sistema consiste em unidades que parecem engrenagens e medem alguns centímetros de diâmetro. Estas unidades se juntam por meio do acoplamento magnético.

Podem assumir estados coletivos semelhantes à sólidos ou líquidos, que podem ser pertubados por atuadores ou pelo ambiente. Dependendo da tarefa e do ambiente, podem mudar de forma, se dividir em grupos menores e se juntar novamente. Além de poderem se locomover de diferentes formas.
Os componentes de uma unidade
Cada unidade tem dois ímãs permanentes (permanent magnets), permitindo que se junte com mais duas unidades. Um motor CC (geared motor), controlado via PWM, gira um destes ímãs ao redor de um eixo central, permitindo a interação e o movimento junto com outras unidades. Em contraste com o outro ímã, que é conectado a um rotor passivo (passive rotor), cuja rotação é livre e pode se mover em torno do eixo central da roda (Free rotating wheel). Os robôs se comunicam de forma descentralizada por um microcontrolador WiFi (Wifi microcontroller).
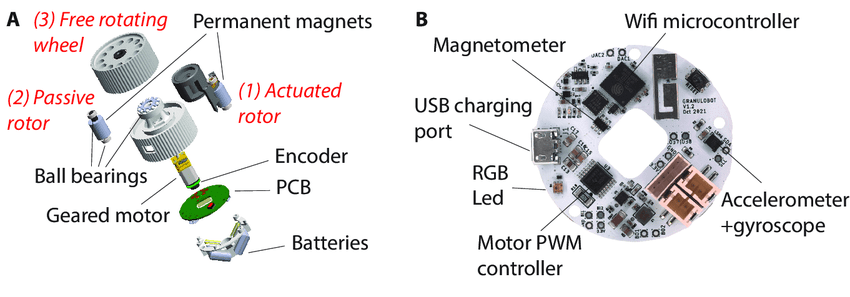
O controle de malha aberta faz o granulobot se comportar como um líquido, enquanto no controle de malha fechada, com realimentação, a plataforma age como um sólido. Cada unidade possui três sensores: o magnetômetro (magnetometer), que detecta o campo magnético, o acelerômetro e o giroscópio (accelerometer+gyroscope), cuja função é fornecer sinais de realimentação para o controle de malha fechada, para que o granulobot individual mantenha a posição angular em relação às outras unidades.

{kind=link}