
Pesquisadores da KAIST, na Coréia do Sul, desenvolveram uma folha robótica programável, que pode se mover, mudar de forma e segurar objetos.
Fonte: AJP (Traduzido para o Português)
Uma equipe de pesquisa da KAIST desenvolveu um novo tipo de material robótico que pode se dobrar em tempo real, mudando de forma e função instantaneamente, sem a necessidade de reconstrução. A inovação combina inteligência artificial física com programabilidade em tempo real, podendo levar a uma nova classe de robôs autônomos capazes de se adaptarem ao ambiente.
A KAIST anunciou nesta quarta-feira, que os professores Kim Jeong e Park In-kyu, do Departamento de Engenharia Mecânica, desenvolveram o que eles chamam de “folha dobrável robótica programável em campo”. Ao contrário de estruturas tradicionais dobráveis, que requerem dobradiças pré-projetadas e direções fixas, este novo material permite aos usuários mudarem os padrões de dobramento e formas através de comandos de software. A equipe espera que tenha aplicações em robôs autônomos, exploração espacial e respostas a emergências.
Estruturas dobráveis já são usadas em robótica há muito tempo, devido à habilidade intuitiva e inteligente de alterar as formas. Porém, mecanismos convencionais são limitados aos projetos fixos, que requerem uma nova estrutura toda vez que a tarefa ou o ambiente mudam. A equipe da KAIST abordou esta limitação, desenvolvendo um sistema que permita aos usuários reprogramarem as posições de dobra em tempo real, usando um material simples e reutilizável.
A folha robótica é feita de um polímero fino e flexível, que possui uma fina rede de resistores metálicos. Estes resistores desempenham duas funções: aquecedores e sensores de temperatura. Permitindo a folha monitorar e controlar seus estados de dobramento, sem hardware externo.
Integrando software alimentado por algoritmos genéticos e redes neurais profundas, os usuários podem determinar as localizações de dobra, direções e intensidade desejadas. Então, a folha responde autonomamente se aquecendo e resfriando, para gerar a forma exata programada. O feedback dos sensores garante que o processo seja continuamente ajustado para a precisão.
Os pesquisadores também aplicaram um sistema de malha fechada de controle de temperatura, que melhora a precisão em tempo real e compensa as mudanças no ambiente. Eles relataram que o sistema resolve uma das limitações chave da tecnologia de dobra baseada em calor, que é o baixo tempo de reação.
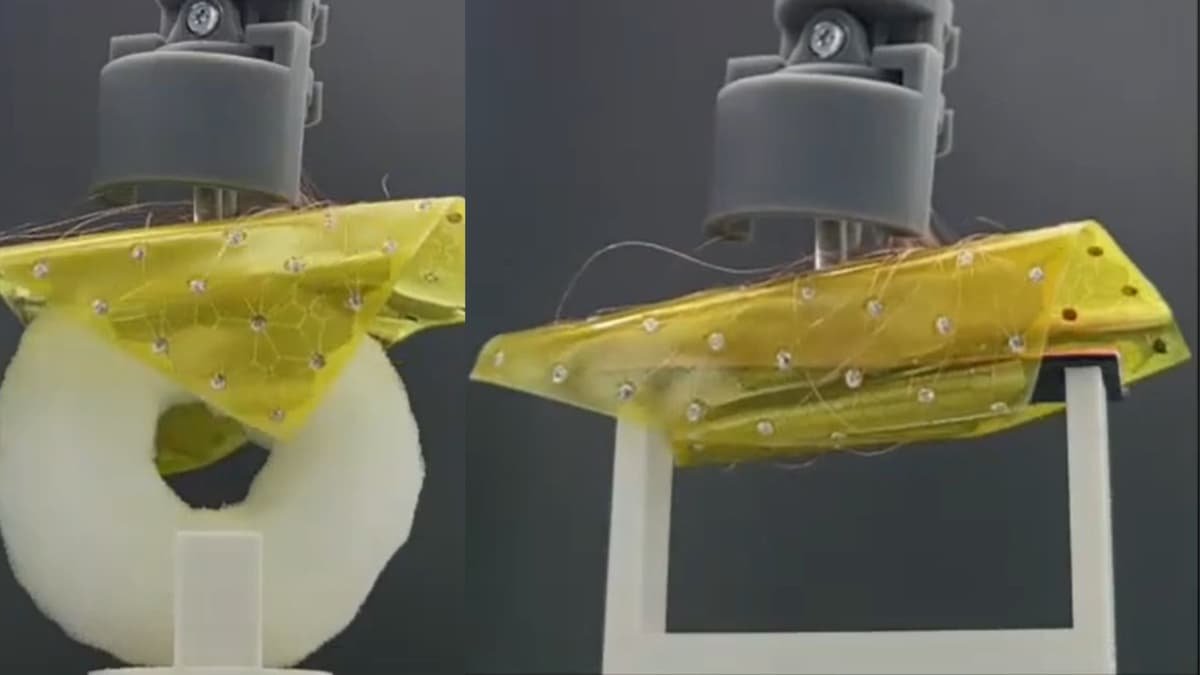
Este tipo de mudança de forma programável permite uma única folha assumir múltiplas funções robóticas sem reprojeto físico. A equipe demonstrou uma pinça robótica adaptável, que pode modificar sua aderência, dependendo da forma do objeto que segura. Em outra demonstração, a mesma folha foi deixada plana em uma superfície e reprogramada para andar ou rastejar, imitando movimentos biológicos. Estes resultados sugerem potencial para robôs adaptáveis ao ambiente em tempo real.
O estudo foi liderado pelo Dr. Park Hyun-kyu, atualmente no Instituto de Tecnologia Avançada de Samsung, pelo professor Jung Yong-rok, agora na Universidade Nacional Kyungpook. Eles foram os co-autores do artigo, que foi publicado em Agosto de 2025, na edição online da Nature Communications.
A pesquisa foi apoiada pela Fundação Nacional de Pesquisa da Coréia sob o Ministério da Ciência e o ICT.
O vídeo a seguir mostra as várias funções da folha robótica.

{kind=link}