
Este post descreve as tecnologias empregadas no robô aspirador para limpar o chão e se mover de forma autônoma.
Motores e o processo de limpeza
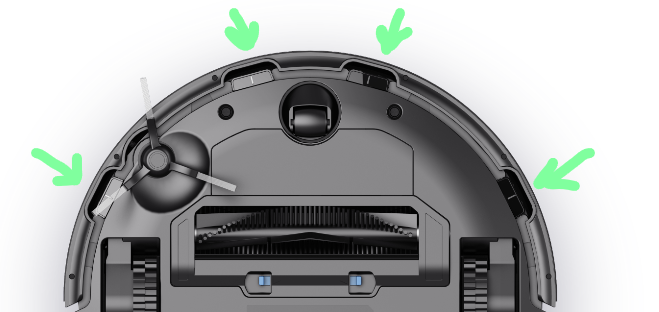
O robô aspirador possui escovas laterais que conduzem a sujeira para o centro, onde uma escova central levanta a sujeira, que é aspirada e armazenada em um depósito.

A parte em azul na figura acima é um pano de limpeza, umedecido por um reservatório de água no interior do robô aspirador. Para levar a sujeira para o depósito, o robô possui um motor de sucção, cuja força é medida em Pa (pascal). Este motor cria uma diferença de pressão do ar para aspirar a sujeira.

Estes motores podem ser de corrente contínua (CC) com escovas ou BLDC (motor CC sem escovas), depende do modelo. Embora os motores CC com escovas sejam mais baratos, os BLDC são mais eficientes, duráveis e geram menos ruído, por não terem escovas.
Navegação autônoma
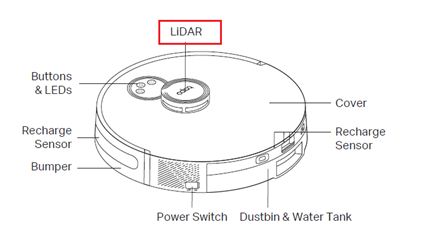
Os sensores são essenciais para que o robô detecte objetos a serem desviados e bordas, para evitar queda. Os principais sensores são:
- O bumper (para-choque) é a parte semicircular que fica na frente e colide com objetos. Quando encosta em um objeto, aciona uma chave mecânica ou sensor infravermelho, que envia um sinal elétrico para o controlador.
- O sensor de parede é outro sensor infravermelho, fica um em cada lado do robô, serve para se movimentar próximo das paredes.

- Para evitar quedas, os sensores infravermelho de borda ficam na parte de baixo.
- Encoder: está ligado às rodas e mede a distância percorrida.
Se o robô navegar aleatoriamente pelo ambiente, muito tempo e energia serão consumidos. Portanto, também são necessários um algoritmo e sensores para que o robô escolha a trajetória mais eficiente para fazer a limpeza.
- Um giroscópio é necessário para medir a orientação e a rotação, para uma navegação eficiente e para girar nos ângulos certos durante a faxina.
- LiDAR ou sensor LDS, para fazer o mapa do ambiente e o algoritmo determinar a melhor trajetória.
- Em vez do LiDAR, alguns modelos utilizam o VSLAM (Mapeamento e Localização Visual Simultâneas), uma câmera para reconhecer os objetos e fazer um mapa do ambiente.
Baterias e recarga do robô aspirador
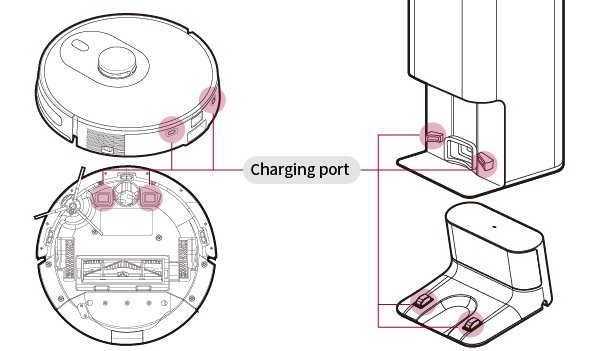
A maioria dos robôs utiliza baterias do tipo lítio-íon ou hidreto de níquel-metal (NiMH). Se a bateria ficar com baixa carga, o robô retorna automaticamente para a estação de recarga.

Comunicação com o robô aspirador
O proprietário pode se comunicar com o robô por meio do Wi-Fi, usando um aplicativo no celular. Pode dar instruções como: criar áreas proibidas no ambiente para o robô não limpar, determinar horários de faxina e selecionar quais cômodos da casa o robô deve limpar.

{kind=link}